Una mano robotica autonoma cammina sulle dita e interagisce con l’ambiente in modi inediti
Un gruppo di ricercatori ha sviluppato una mano robotica capace di muoversi autonomamente sulle dita, afferrare oggetti con modalità inedite e operare in spazi troppo angusti per le mani umane.
La sua architettura non antropomorfa amplia le possibilità applicative della robotica in ambiti industriali, logistici e di ispezione in ambienti inaccessibili.
Progetto e obiettivi della ricerca
La nuova mano robotica è stata presentata in uno studio pubblicato il 20 gennaio 2026 sulla rivista Nature Communications. Il sistema è stato progettato da un team di ricerca guidato da Aude Billard, esperta di robotica e intelligenza artificiale presso il Politecnico Federale di Losanna (EPFL). L’obiettivo del progetto era sviluppare una mano meccanica con caratteristiche funzionali diverse da quelle ispirate all’anatomia umana, sfruttando soluzioni morfologiche non vincolate da simmetrie o limiti articolari biologici.
L’approccio alla progettazione è stato basato su un algoritmo genetico, una forma di ottimizzazione evolutiva utilizzata per simulare e selezionare configurazioni funzionali partendo da un insieme di variabili. Attraverso centinaia di iterazioni simulate, il sistema ha identificato modelli di mano robotica in grado di muoversi, afferrare oggetti e trasportarli in condizioni non standard.
Struttura e funzionalità meccaniche
I prototipi realizzati includono una versione a cinque dita e una versione a sei dita. Entrambi i modelli sono dotati di dita articolate capaci di piegarsi sia in avanti sia all’indietro, consentendo nuove strategie di presa. Il robot può ad esempio sostenere un oggetto premendolo sia sul palmo sia sul dorso della mano, un’azione biomeccanicamente impossibile per una mano umana.
Durante le prove in laboratorio, la mano ha dimostrato di poter svolgere operazioni come tenere una palla tra due dita; avvolgere una barra metallica con quattro dita; stringere un disco piatto tra palmo e dita; e svitarne il tappo di una bottiglia tenendola ferma.
La combinazione di articolazioni flessibili, superfici di presa asimmetriche e indipendenza dall’anatomia umana conferisce al dispositivo un elevato grado di adattabilità operativa.
Movimento autonomo su superfici e capacità di trasporto
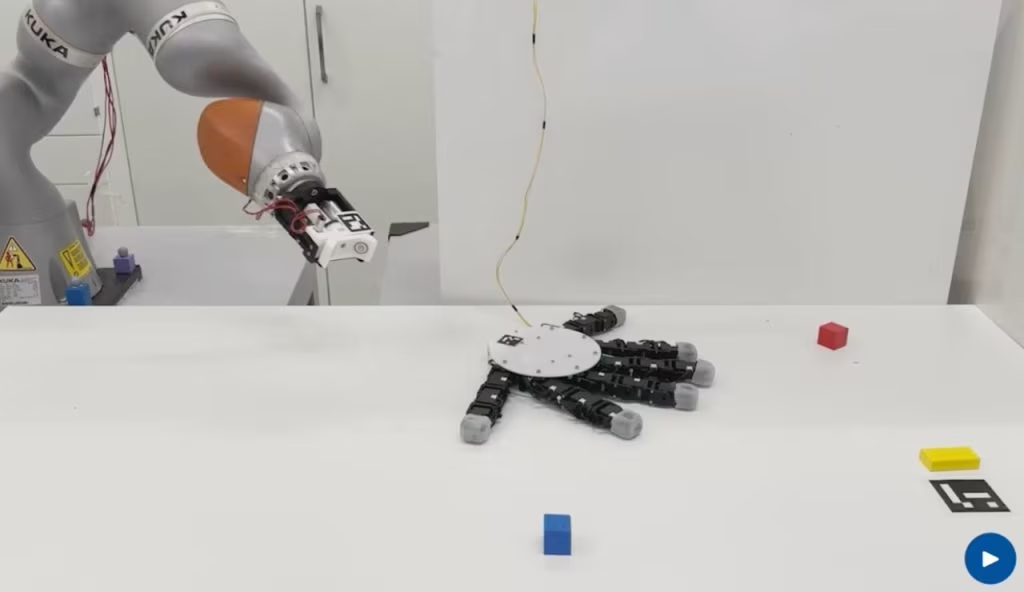
Una caratteristica distintiva del sistema è la capacità di muoversi autonomamente utilizzando le dita come arti locomotori. La mano è in grado di disconnettersi da un braccio robotico, camminare su superfici piane sfruttando la spinta alternata delle dita e recuperare oggetti posti fuori dalla portata dell’unità principale.
Durante i test, la mano ha mostrato maggiore stabilità utilizzando quattro o cinque dita per la deambulazione e dedicando una o due dita alle operazioni di presa. In un esperimento, il robot ha percorso in autonomia lo spazio tra l’unità e un blocco in legno, lo ha afferrato con un dito e lo ha riportato indietro.
Implicazioni e contesti applicativi
La versatilità della mano robotica consente applicazioni in ambienti ristretti, isolati o pericolosi, nei quali non è possibile l’intervento diretto di un operatore umano o l’accesso di un robot convenzionale. I ricercatori indicano possibili impieghi in:
- Ispezioni industriali di condutture e impianti;
- Recupero oggetti in magazzini o aree di stoccaggio complesse;
- Interventi di emergenza in spazi confinati o scenari post-catastrofe;
- Protesi robotiche avanzate, con ulteriori studi sul controllo neurale.
La mano potrebbe integrarsi in sistemi robotici mobili, agendo come unità secondaria indipendente per operazioni mirate, oppure essere utilizzata come strumento multifunzionale in contesti collaborativi uomo-macchina.
Considerazioni sulla progettazione non antropomorfa
Secondo gli autori dello studio, abbandonare i vincoli dell’anatomia umana ha permesso di ottenere un sistema più efficiente per alcune funzioni specifiche. La possibilità di superare la simmetria e la rigidità articolare tipiche dei robot antropomorfi si traduce in un design funzionale più vicino alle necessità operative che alle limitazioni biomeccaniche.
Come osservato da Matei Ciocarlie, ingegnere meccanico alla Columbia University, lo studio rappresenta un esempio di progettazione libera dai vincoli imposti dalla replicazione dell’arto umano. Questo approccio favorisce soluzioni inedite che si adattano meglio ai compiti target e agli ambienti operativi reali.